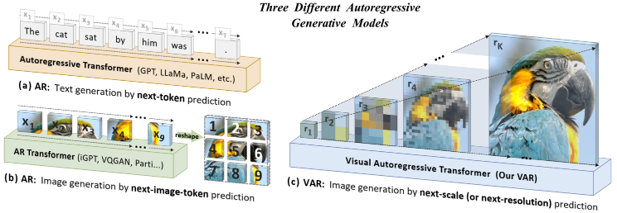
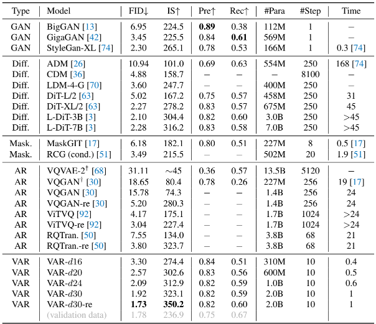
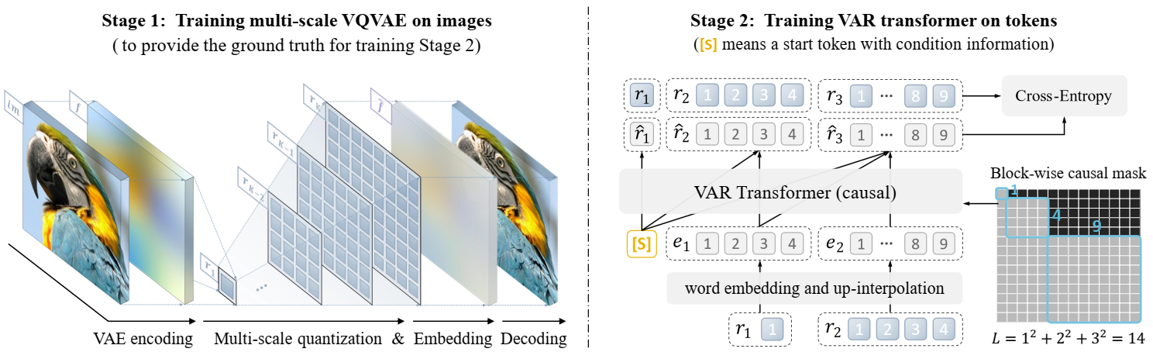
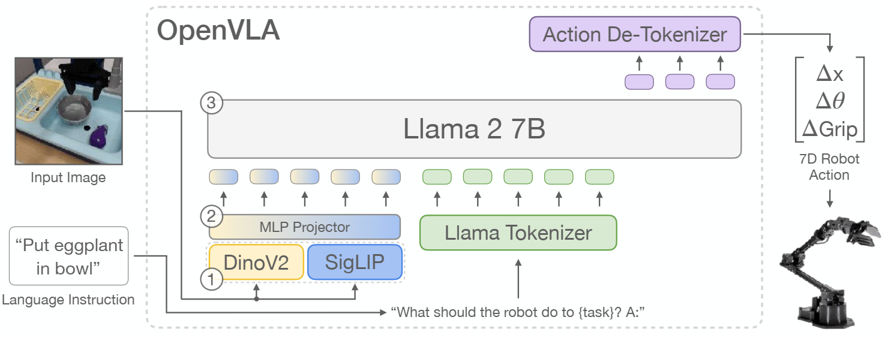
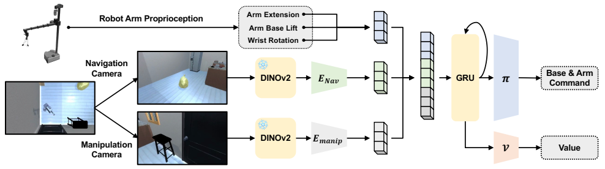
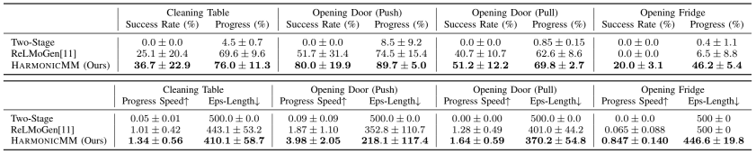
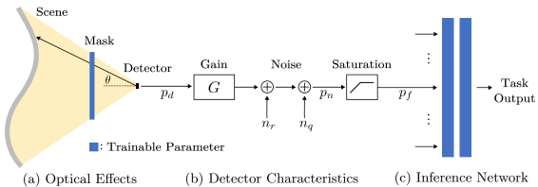
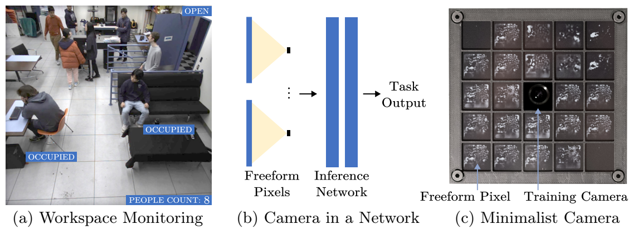
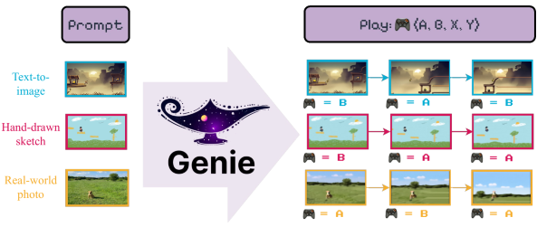
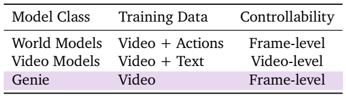
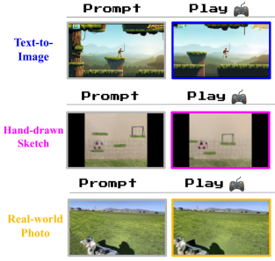
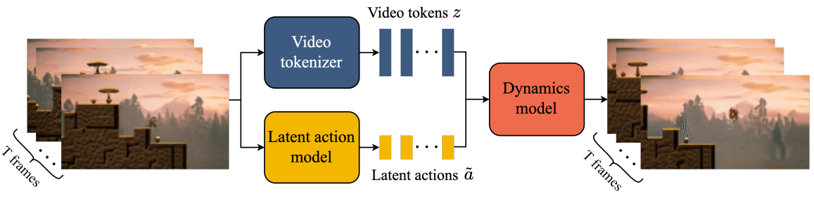
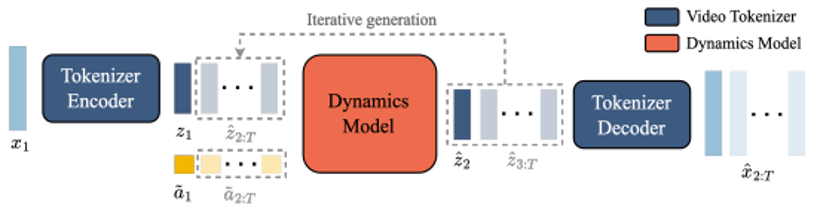
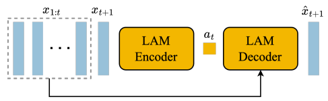
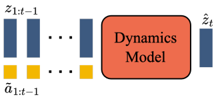
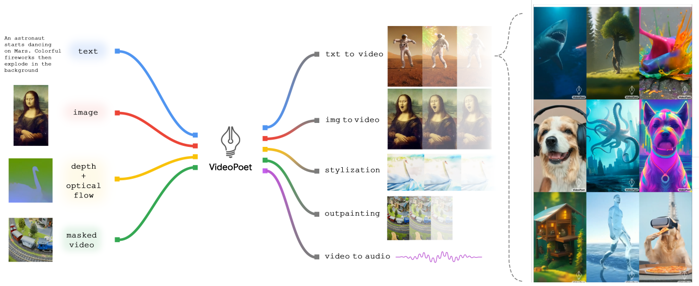
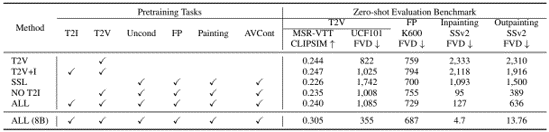
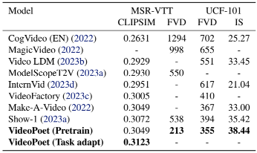
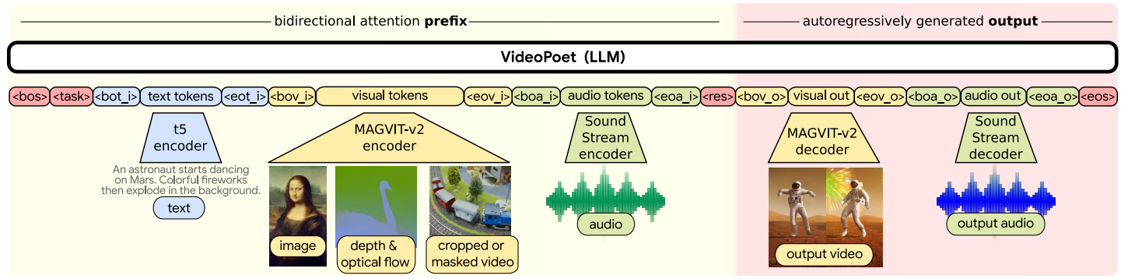
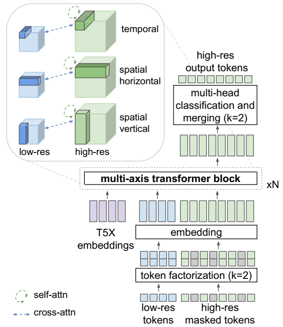
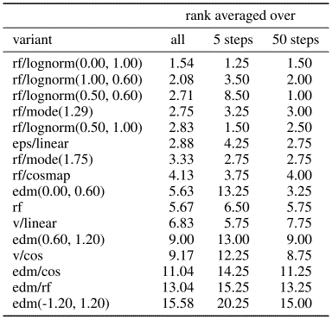
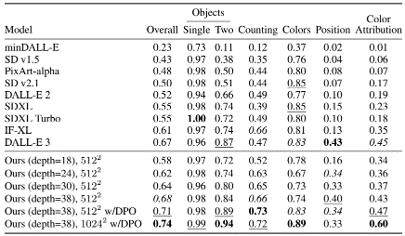
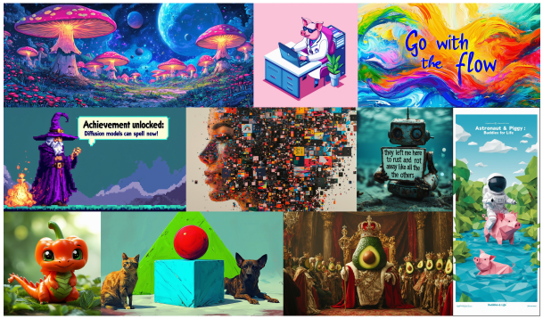
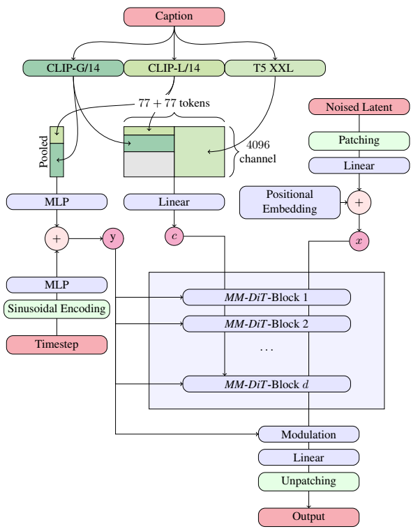
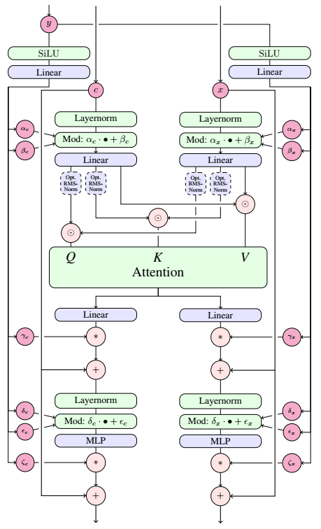
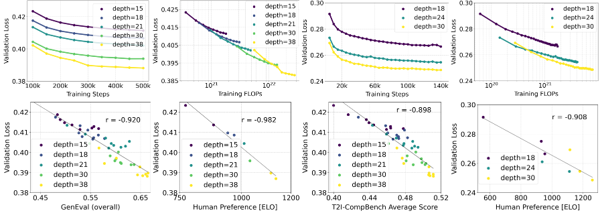
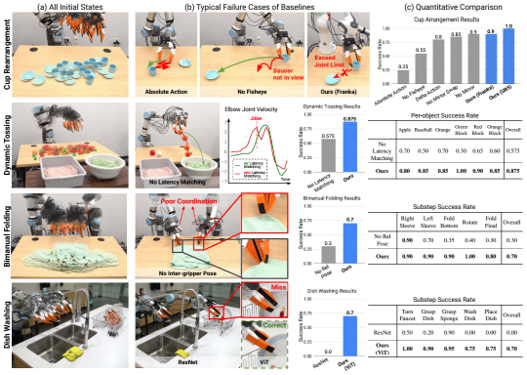
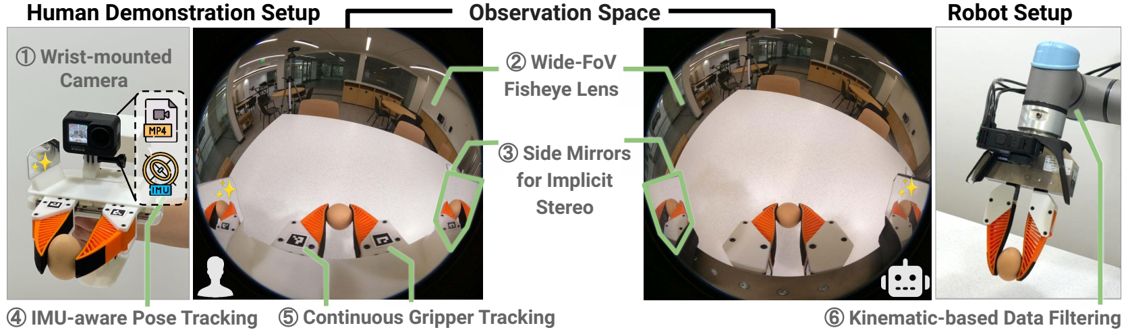
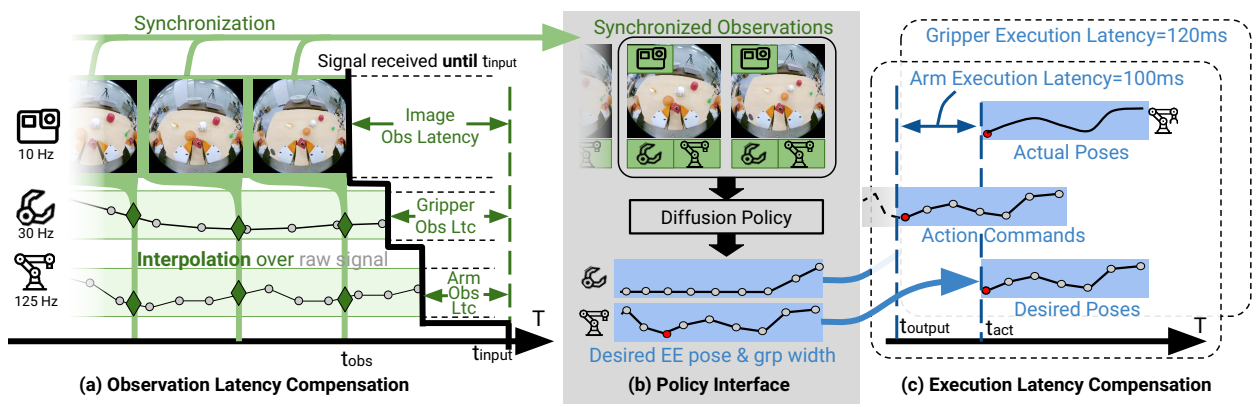
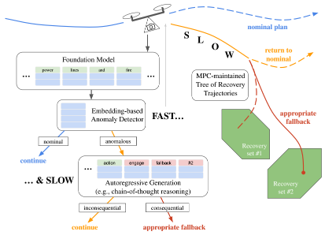
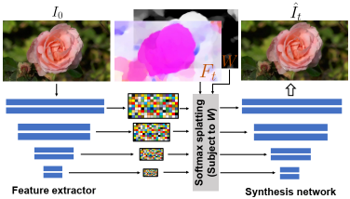
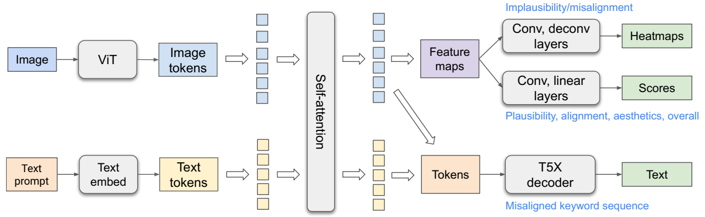
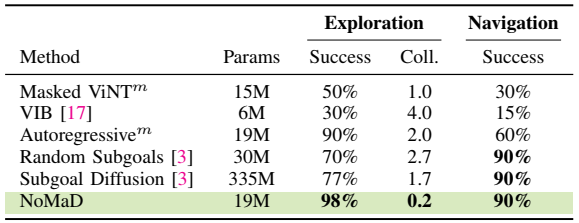
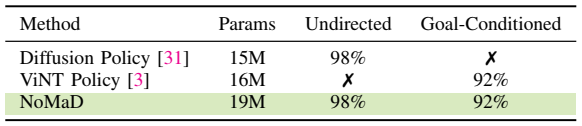
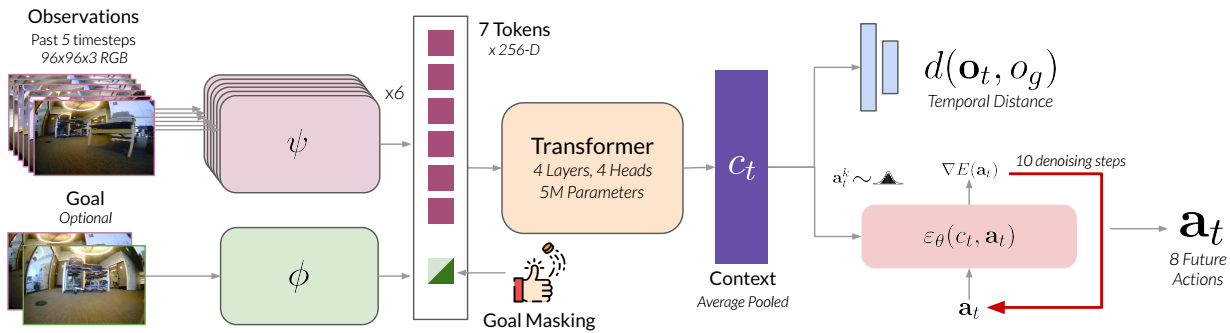
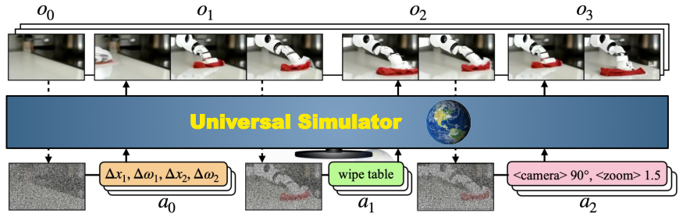
Skip to main content Link Expand (external link) Document Search Copy Copied Visual AutoRegressive Modeling (VAR ) title and link: Visual Autoregressive Modeling: Scalable Image Generation via Next-Scale Prediction information: NeurIPS 2024 best paper ByteDance (Liwei Wang) problem and position: autoregressive style image generation beats diffusion method overview: redefine order as coarse-to-fine next-scale prediction teaser: results: beat diffusion, scaling law method details: VQGAN with modified multi-scale quantization layer to tokenize image into multi-scale token maps decoder-only Transformer like GPT-2 for next-scale prediction Open-source VLA (OpenVLA ) title and link: OpenVLA: An Open-Source Vision-Language-Action Model information: CoRL 2024 outstanding paper finalist Stanford (Chelsea Finn, Percy Liang, Sergey Levine, Dorsa Sadigh, Russ Tedrake) problem and position: general VLA method overview: finetune VLM on robotic dataset results: beat RT-X when zero-shot or finetuning method details: finetune Prismatic-7B VLM, with 600M pretrained SigLIP and DINOv2 vision encoder, small MLP projector, 7B Llama 2 LLM train on Open X-Embodiment dataset 7B parameters, trained with 64 A100s for 14 days, inference 6Hz open source From Speaker to Dubber (speaker2dubber ) Harmonic Mobile Manipulation (HarmonicMM ) title and link: Harmonic Mobile Manipulation information: IROS 2024 best mobile manipulation paper AI2 problem and position: end-to-end learning navigation and manipulation method overview: RGB images input and base+arm actions output, train by DD-PPO in ProcTHOR results: Minimalist Vision (MinimalistVision ) title and link: Minimalist Vision with Freeform Pixels information: ECCV 2024 best paper Columbia problem and position: use smallest number of pixels to solve a lightweight vision task method overview: freeform pixels as the first layer of network for training, deployed by learned optical masks and photodetectors teaser: results: 8 pixels for monitoring indoor spaces, measuring room lighting and estimating traffic flow GENerative Interactive Environments (Genie ) title and link: Genie: Generative Interactive Environments information: ICML 2024 best paper DeepMind problem and position: the first world model learning from action-unlabeled videos method overview: spatiotemporal video tokenizer, latent action model, dynamics model teaser: results: experiments on 2D platformer games and robotics RT1 method details: video tokenizer is VQ-VAE-based to encode and decode video latent action model is VQ-VAE-based, treat latent variable as action, limit $|A| = 8$, directly from pixels for better performance dynamics model is a decoder-only MaskGIT on tokens with action additive instead of concat for better performance first train video tokenizer, then co-train latent action model and dynamics model, inference discard latent action model with only action codebook all components use spatiotemporal Transformer for memory efficiency 11B parameters, most on 10.1B dynamics model, trained with 256 TPUv5p Video Poet (VideoPoet ) title and link: VideoPoet: A Large Language Model for Zero-Shot Video Generation information: ICML 2024 best paper Google problem and position: LLM-based video generation method overview: modality-specific tokenizers, decoder-only autoregressive Transformer, super-resolution Transformer teaser: results: method details: decoder-only Transformer backbone for autoregressive generation modality-specific tokenizers to map into unified space text: pretrained frozen T5 XL encoder image and video: MAGVIT-v2 tokenizer audio: pretrained SoundStream tokenizer super-resolution Transformer with window attention pretraining task mixture, finetune on text2video Stable Diffusion 3 (SD3 ) title and link: Scaling Rectified Flow Transformers for High-Resolution Image Synthesis information: ICML 2024 best paper Stability problem and position: improve rectified flow Transformers for text2image method overview: middle-frequent sampling for rectified flow, multi-modal DiT results: Rectified Flow forward process but with more frequent sampling for middle timesteps training MM-DiT builds upon DiT 8B parameters scaling law Universal Manipulation Interface (UMI ) title and link: Universal Manipulation Interface: In-The-Wild Robot Teaching Without In-The-Wild Robots information: RSS 2024 outstanding systems paper Stanford (Shuran Song) problem and position: portable and low-cost and in-the-wild robotics data collection by human method overview: soft-gripper with camera and IMU results: method details: teleoperation high cost, human video large gap hand-held soft gripper, but with fisheye camera and side mirrors, GoPro IMU pose tracking, marker for width detection filtered unreachable data by forward kinematics raw fisheye images without undistortion as input reflecting the crops in the mirrors works better for policy learning synchronized RGB images, relative gripper pose and width as inputs, delayed relative gripper pose and width as outputs Diffusion Policy imitation learning Fast-Slow LLM Anomaly Detection (AESOP ) title and link: Real-Time Anomaly Detection and Reactive Planning with Large Language Models information: RSS 2024 outstanding paper Stanford problem and position: robotics anomaly detection method overview: fast-stage LLM embedding similarity with dataset to threshold anomaly, slow-stage LLM reasoning to select continue or any predefined recovery strategy, MPC with both nominal and recovery objective results: not standard benchmark, self comparison Generalized Winding Numbers (GWN ) Generative Image Dynamics (GID ) title and link: Generative Image Dynamics information: CVPR 2024 best paper Google problem and position: model image-space motion for turning single image to looping video or interactive demo method overview: diffusion model predicts Fourier domain spectral volumes, Fourier transform to warp motioned future frames teaser: results: method details: motion texture as 2D displacement maps ${F_t \mid I_t(\mathbf{p} + F_t(\mathbf{p})) = I_0(\mathbf{p}), t = 1, \ldots, T}$ directly predicting motion texture scales with $T$ Fast Fourier Transform to frequency domain $S(\mathbf{p}) = FFT(F(\mathbf{p}))$ and only low-freq $K = 16$ enough latent diffusion model predicts $4K$-channel 2D motion spectrum map, with $4$ Fourier coefficients each frequency normalization for stable training concentrates to low-freq, so normalize per frequency directly outputting $4K$ channels yields over-smoothed results, so first train conditioning on frequency embedding to predict single $4$-channel coefficients, then freeze and insert attention layers for coordinating different frequencies and fine-tune rendering with additional multi-scale ResNet-34 features soft-warped by $F_t = FFT^{-1}(\hat{S})$ and $W = \frac{1}{T} \sum_t |F_t|_2$ to decode train from scratch for 6 days with 16 A100s collect 3015 videos as >150k image-motion pairs Rich Automatic Human Feedback (RAHF ) title and link: Rich Human Feedback for Text-to-Image Generation information: CVPR 2024 best paper Google problem and position: fine-grained human feedback on text-image alignment for text2image generation method overview: fine-grained annotated text-image alignment dataset and transformer model to predict the human feedbacks results: can help text2image generation models method details: RichHF-18K dataset from Pick-a-Pic marking image regions, marking text words, annotating rate multimodal transformer with multiple heads finetune Muse on the self-generated images with high RAHF-predicted score Muse inpainting with RAHF-predicted implausibility heatmap NavigatiOn with goal MAsked Diffusion (NoMaD ) title and link: NoMaD: Goal Masked Diffusion Policies for Navigation and Exploration information: ICRA 2024 best paper UCBerkeley (Sergey Levine) problem and position: single network for goal-directed navigation and goal-agnostic exploration method overview: Transformer encoder with optional goal condition masking for observed images and diffusion policy for future actions results: method details: ViNT as the encoder backbone for goal-conditioned navigation ViKiNG’s topological graph for goal-free exploration 50% probability goal masking during training 1D conditional UNet as the diffusion policy train on combination of GNM and SACSoN datasets Robotics Transformer X (RT-X ) Universal Simulator (UniSim ) title and link: Learning Interactive Real-World Simulators information: ICLR 2024 outstanding paper UCBerkeley (Pieter Abbeel) problem and position: action-conditioned video prediction enables robot learning method overview: accept language, motor action, camera motions as actions, then action-conditioned video diffusion model teaser: results: used for high-level VLM policy and low-level RL policy training method details: different video datasets cover different information texts by T5 language embedding, motor actions, camera motions video 3D UNet diffusion model predicts next frames conditioned on observed frames and actions autoregressively action-condition by classifier-free guidance 5.6B parameters experiment PaLM-E image-goal conditioned VLM policy and PaLI VLA policy with learned reward function for block rearrangement on 10k generated videos