problem and position: the first general in-hand object re-orientation
method overview: model-free RL with teacher-student learning
teaser:
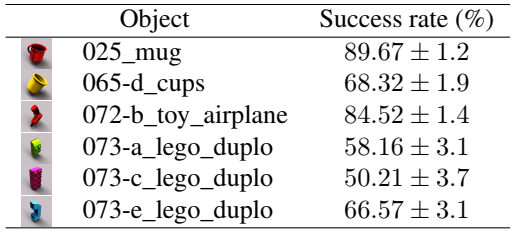
results: serve as strong baseline
method details:
teacher policy by PPO with MLP, input states that can get from simulator but not real world, goal set by giving difference with target orientation as also state, output delta robot joints
student policy by Dagger distillation with sparse 3D CNN, input hand joint positions and scene point cloud, goal set by giving target object point cloud as also input, output delta robot joints
object stable configuration initialization for facing downward: first train an object-lifting policy and use it to collect lifted ending configurations and use them as initialization for reorientation policy training
gravity curriculum learning for facing downward: gradually adding gravity
one object one individual student policy
surprising finding: visual perception can generalize to unseen objects well
problem and position: video background music generation consistent with video
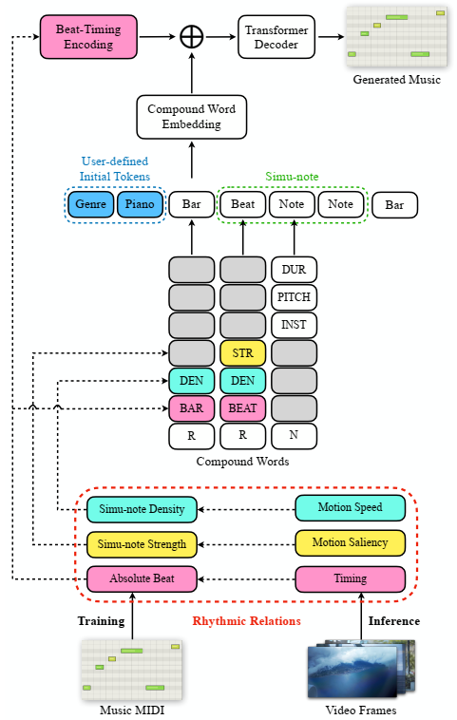
method overview: rhythmic relations between video and music to extract corresponding music attributes, then Transformer generates music from music attributes
results: not standard benchmark, self comparison
method details:
positive correlation between motion speed and simu-note density
motion speed as average optical flow magnitude this clip
align local-max motion saliency with simu-note strength
motion saliency as average optical flow change this frame
music appears and disappears smoothly along with the start and end of video
frame number in video corresponds to beat/bar timing
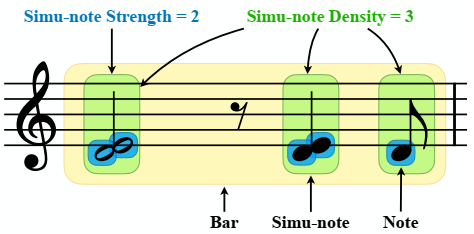
rhythm-related music attributes: beat/bar, density, strength
note-related music attributes: pitch, duration, instrument
these attributes as tokens for Transformer
training uses only music dataset, music attributes reconstruct music
inference uses video, extract music attributes by rhythmic relations and then generate music
information: ICML 2021 outstanding paper Toronto Google
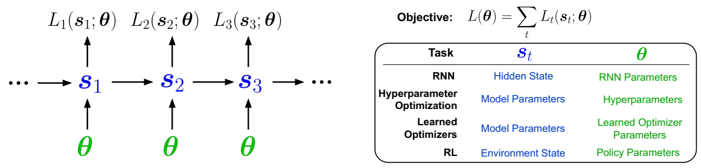
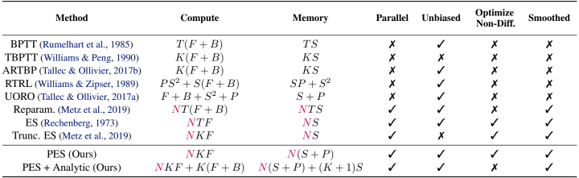
problem and position: deal with high variance, bias, slow and large memory problems in parameters optimizing in unrolled computation graphs
method overview: actually Truncations ES already solves slow and large memory problems, PES improves based on it by accumulating correction terms over entire sequences of unrolls, I cannot understand
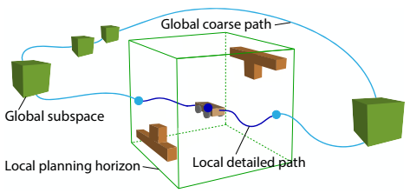
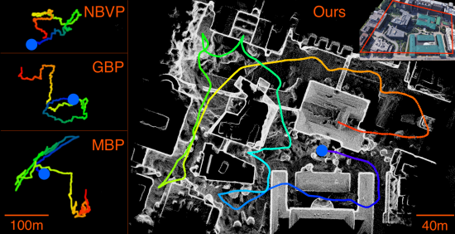
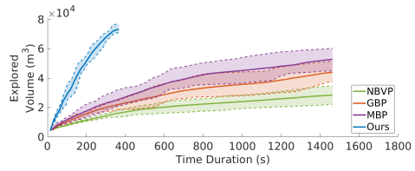
problem and position: efficient autonomous exploration in complex 3D environment
method overview: hierarchical with one level computing detailed path within a local planning horizon and another level computes coarse path at the global scale, I cannot understand
problem and position: controllable image generation such as poses and composition
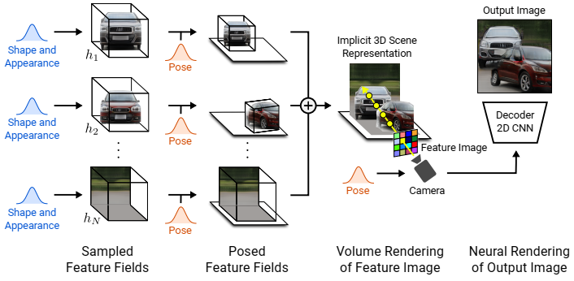
method overview: incorporate compositional NeRFs for individual objects into GAN
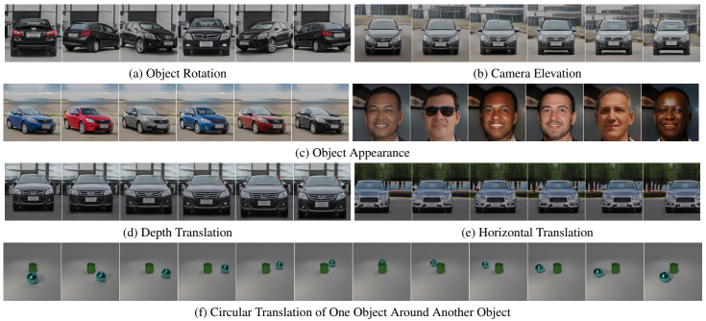
teaser:
results:
method details:
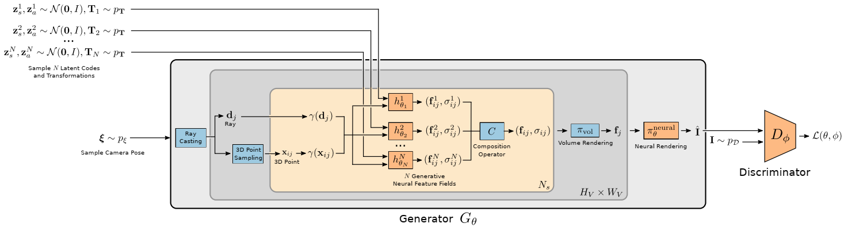
generator like GRAF, sample camera pose $\xi$ to get query ray $(x, d)$, sample latent variables $z_s$ for shape and $z_a$ for appearance to generalize across scenes, but output feature $f$ instead of color $c$
decompose scene into $N-1$ foreground objects and $1$ background, all share the same neural field, then use different transformation $T$ to compose
classical 3D volume rendering on feature $f$ instead of color $c$ to low-resolution feature image $I_V \in R^{H_V \times W_V \times M_f}$
2D CNN decodes feature image $I_V$ to RGB image $\hat{I} \in R^{H \times W \times 3}$
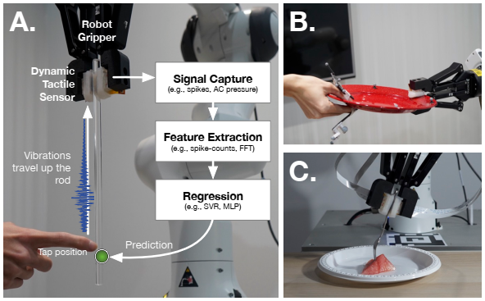
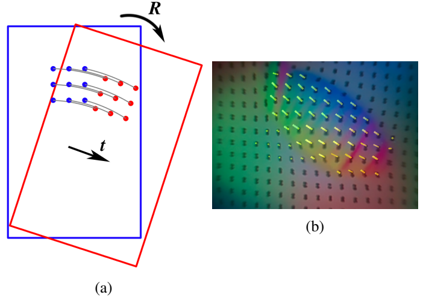
problem and position: the first defining and dealing with the ECS task
method overview: distributed tactile sensor measurements estimate object motion and contact prior gives constraints to the motion which can be used to optimize the contacts
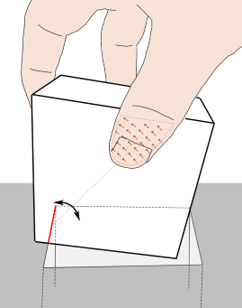
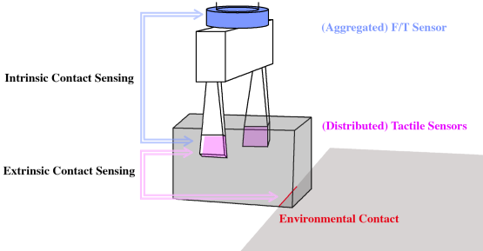
teaser:
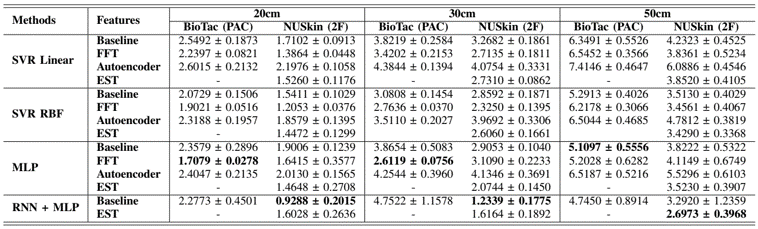
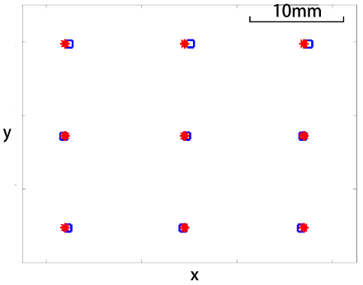
results:
method details:
ECS estimates the contacts between the object and environment using distributed tactile sensors, ICS estimates the contacts between finger and the object using aggregated force/torque sensor
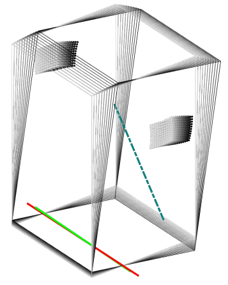
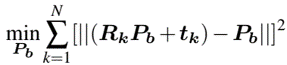
motion with prior contact has constraints such as fixed point contact, which can be formed as optimization problem
motion can be estimated by distributed tactile sensor
information: ICLR 2021 outstanding paper Stanford Google
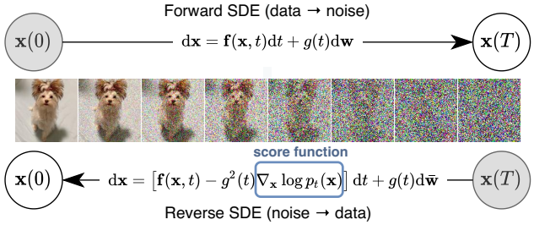
problem and position: unified framework for score-based diffusion models
method overview: use continuous SDE to describe diffusion process, need SDE solver to do reverse sampling
method details:
diffusion process can be written as SDE, with reverse SDE needing score function to be learned
SMLD and DDPM’s diffusion both can be regarded as discretized SDEs
Predictor-Corrector sampler: numerical SDE solver first gives an estimate as predictor, then score-based MCMC corrects the marginal distribution of the estimate as corrector
SMLD can be regarded as identity predictor and annealed Langevin dynamics corrector, DDPM can be regarded as ancestral sampling predictor and identity corrector