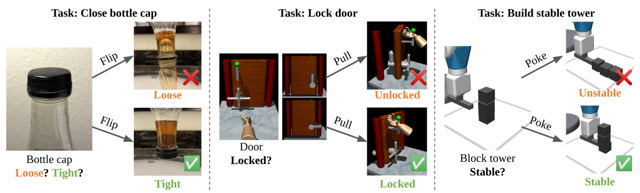
problem and position: to act as reward function for RL on robot manipulation, target image is partial but interaction can easily evaluate success
method overview: learn interaction policy instead of original image-based classifier as interactive reward function
teaser:
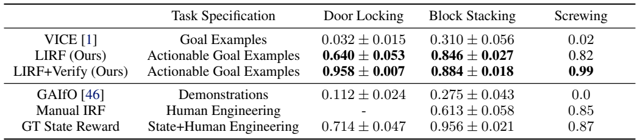
results:
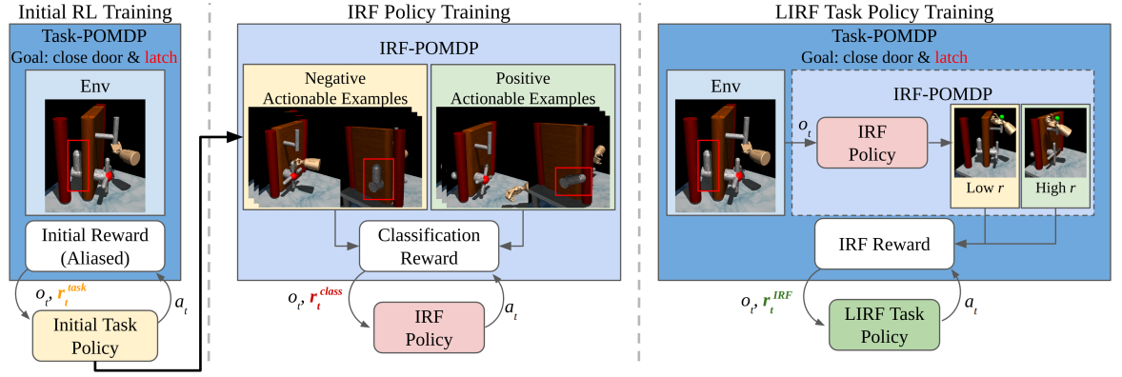
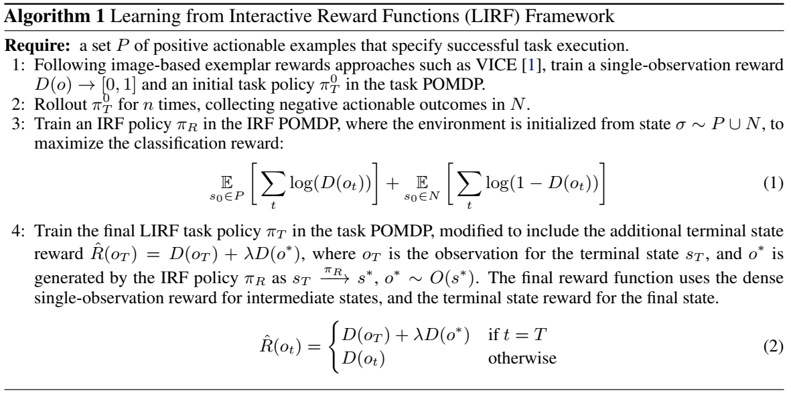
method details:
original exemplar rewards are learned by image-based classifier $D(o)$, which is pre-trained on provided target image examples
here examples change to provided target actionable instances
here classifier changes to IRF policy $\pi_R$
here exemplar reward changes to image-based classifier reward $D(o^)$ on the image after IRF policy executing $o^T \overset{\pi_R}{\rightarrow} o^$
here IRF policy pre-training changes to maximizing image-based classifier rewards
additionally use IRF policy during inference executing, run $\pi_T$ a fixed steps and then run $\pi_R$ to determine whether complete, if not resume $\pi_T$
information: CoRL 2022 special innovation paper Google (Chelsea Finn, Sergey Levine)
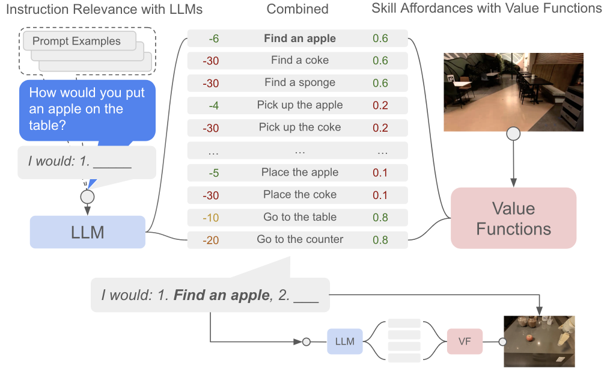
problem and position: mobile manipulation given human instruction, LLM can do high-level instruction planning but without specific context
method overview: LLM plans high-level autoregressively (task-grounding) and affordance function judges feasible each step under current state (world-grounding)
results: over 101 instructions but only in 1 scene, synthetic as 74% success rate, real as 64% success rate
method details:
predefined 551 short task skills, trained individually by BC or RL
pretrained scoring LLM judges probability $p(l_{\pi} \mid i)$ for different skill description $l_{\pi}$ following the instruction $i$
affordance function gives success rate $p(c_{\pi} \mid s, l_{\pi})$, obtained as value function from task skills training
information: NeurIPS 2022 outstanding paper Google (Jonathan Ho)
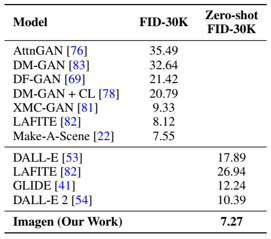
problem and position: SOTA text2image diffusion model
method overview: frozen language model get text embedding and used to condition diffusion model and then super-resolution diffusion model
results: SOTA zero-shot FID score of 7.27 on COCO
method details:
frozen T5-XXL encoder maps text to embedding
text embedding as condition on U-Net diffusion model, trained by classifier-free guidance, with dynamic thresholding
two super-resolution diffusion models also condition on text embedding, also trained by classifier-free guidance, but with noise conditioning augmentation and noise level conditioning
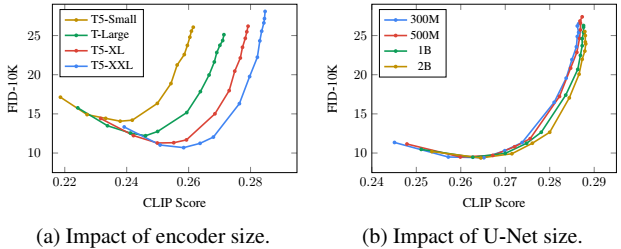
additionally, discover insight that large frozen language models trained only on text data are surprisingly very effective text encoders for text-to-image generation (the other type is image-text pair training like CLIP)
additionally, discover insight that scaling the size of frozen text encoder improves sample quality significantly more than scaling the size of image diffusion model
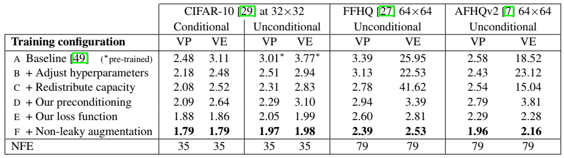
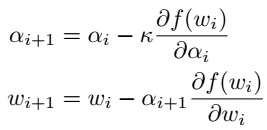
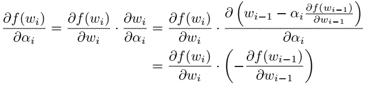
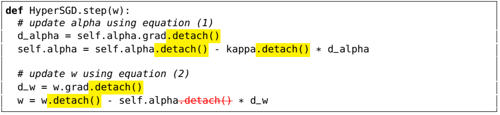
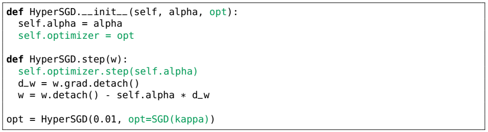
problem and position: automatically differentiate hyperparameters to avoid hyperparameters tuning
method overview: Baydin et al. (2018) manually calculate gradients, but we want to apply AD to hyperparameters and easily extend to other optimizers and also easily stack recursively
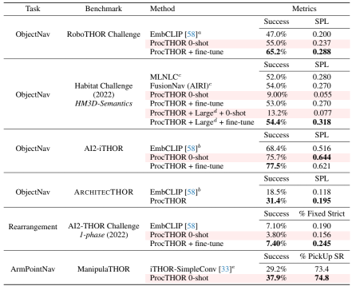
information: NeurIPS 2022 outstanding datasets and benchmarks paper Nvidia (Linxi Fan, Yuke Zhu)
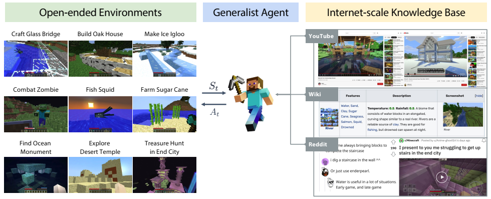
problem and position: MineCraft benchmark
method overview: simulation platform and thousands of defined open-ended tasks and internet-scale multimodal MineCraft knowledge base and pre-training MineCLIP as RL reward also evaluation metric
teaser:
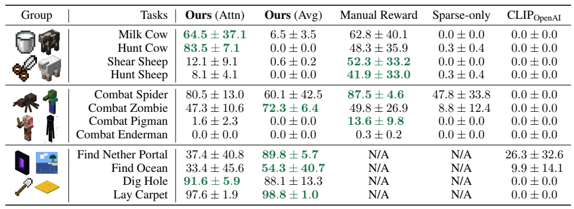
results:
method details:
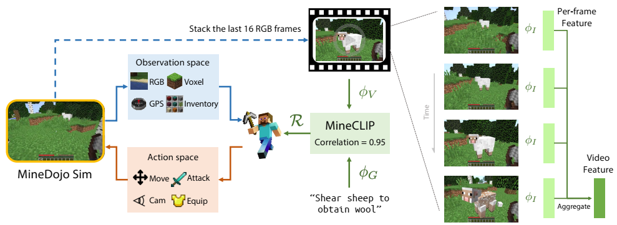
built upon MineRL
properties: unified observation and action spaces across all tasks, include all three worlds
1581 programmatic tasks have determinant success criterion, 1560 creative tasks use MineCLIP
knowledge base include YouTube videos with transcripts and MineCraft wiki and Reddit posts
PPO RL agent with MineCLIP reward
MineCLIP as pre-trained contrastive video-language model by YouTube knowledge base
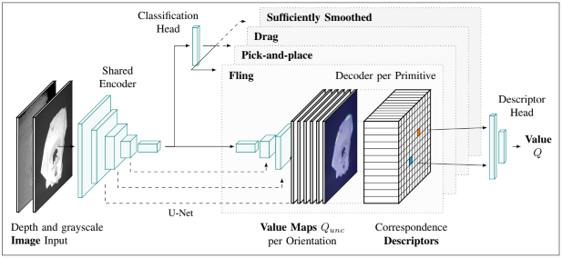
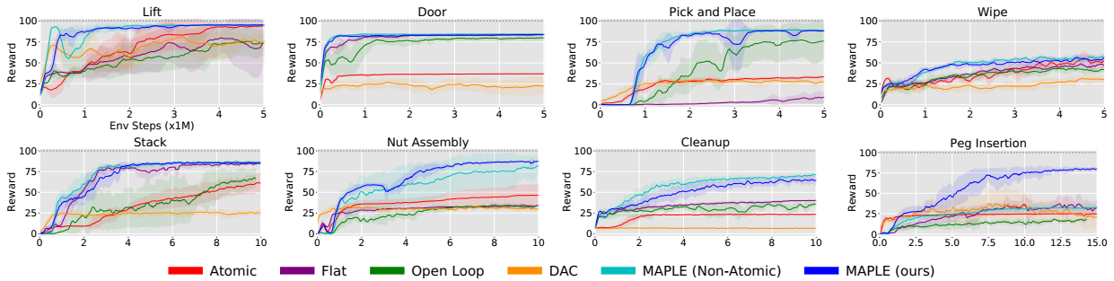
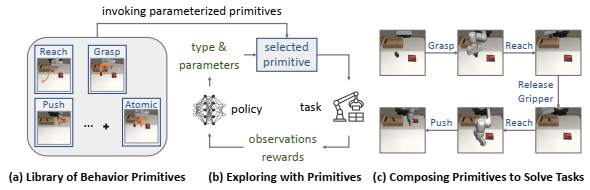
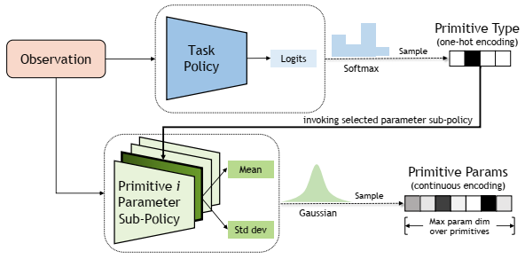
method overview: pre-defined action primitives and BiMaMa-Net classifies action primitive and outputs action value map
teaser:
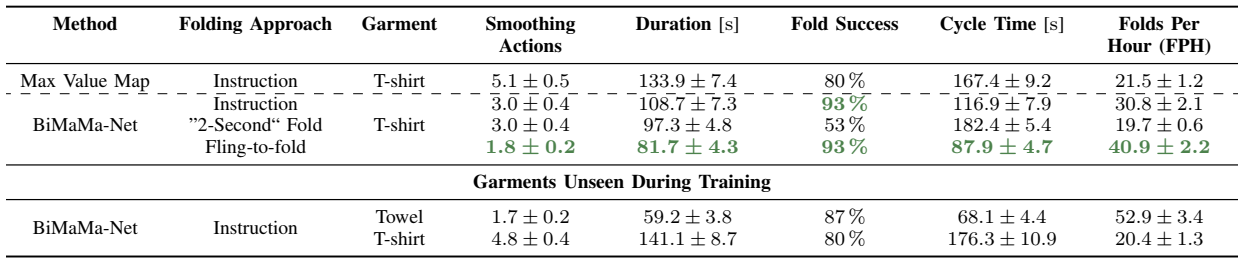
results:
method details:
two-stage: first smooth then fold
smoothing action primitives: fling, pick-and-place and drag
folding action primitives: fold and move
classifier head outputs smoothness value to change from smoothing stage to folding stage
shared ResNext encoder backbone and then classification head to determine action primitive $m$ and then decoder per action primitive to decode action value $Q(<x_1, y_1, \theta_1>, <x_2, y_2, \theta_2>)$, then select the highest action value to perform $(m, <x_1, y_1, \theta_1>, <x_2, y_2, \theta_2>)$
decoder first outputs value map $Q_{unc}$ for single arm and then forms correspondence descriptor $d$ and then samples pair of correspondence descriptors $d_1, d_2$ according to probability of value and then MLP to final value $Q(d_1, d_2)$
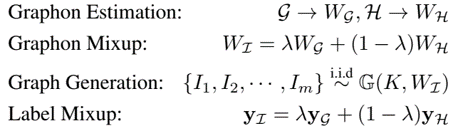
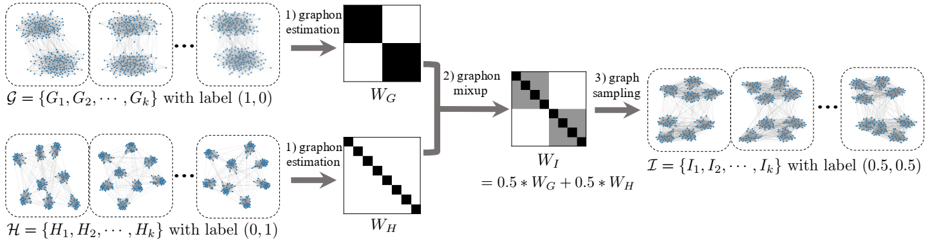
problem and position: study applications for partial distance correlation in deep learning
method overview: partial distance correlation as measurement between representations, used for (1) learning multiple networks for mutually independent features by PDC as regularization loss, (2) measuring similarity between networks by calculate PDC between hidden layers, (3) disentangling latent variables for generative model by PDC as regularization loss
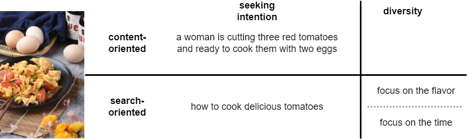
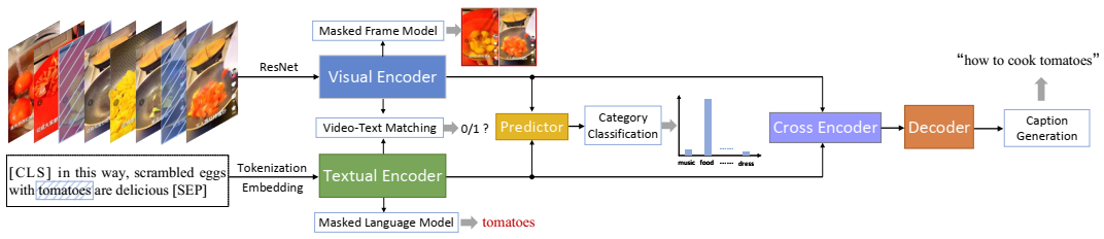
problem and position: the first search-oriented micro-video captioning
method overview: construct search-oriented micro-video captioning dataset, pre-train a multimodal network, use to form a captioning model
teaser:
results:
method details:
instead of content-oriented video captioning, we focus on generating query-like captions from consumer perspective
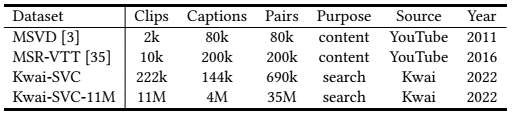
golden Kwai-SVC and larger Kwai-SVC-11M: search-oriented micro-video captioning datasets based on Kwai
Multimodal prE-training nEtwork based on the Kwai platform (MEEK): 574M parameters trained on Kwai-SVC-11M with 5 tasks
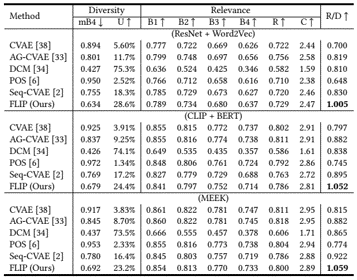
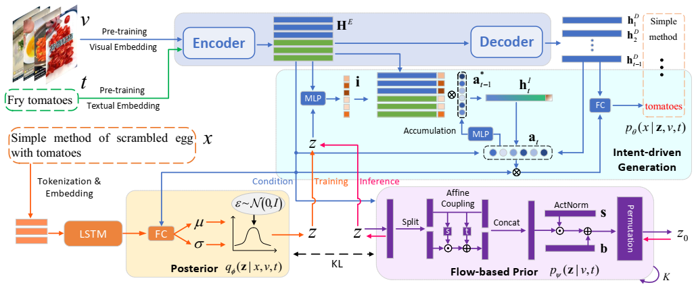
FLow-based dIverse caPtioning approach (FLIP): CVAE-like
Transformer-based encoder and decoder: input visual and textual features extracted by MEEK $V \in R^{D \times M}, T \in R^{D \times N}$ and output hidden states $H^E, H^D \in R^{D \times (M+N)}$
MLP-based posterior $q_{\phi}(z \mid x, v, t)$: capture diversity by modeling Gaussian distribution $N(z; \mu, \sigma^2)$
flow-based prior $p_{\psi}(z \mid v, t)$: transfer diversity from posterior to prior by minimizing KL divergence, using invertible flow transformation from $N(z_0; 0, I)$
intent-driven generation: input $H^E, H^D$ and condition $z$ and output $x$
information: RSS 2022 best paper Columbia (Shuran Song)
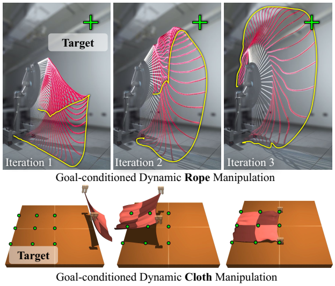
problem and position: goal-conditioned dynamic manipulation of deformable objects
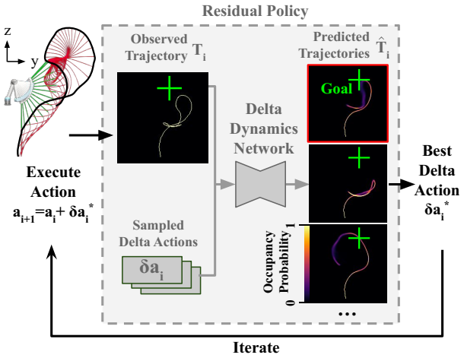
method overview: sample delta action and predict resulting trajectory and select the best delta action to execute in the next iteration
teaser:
results:
method details:
given observed trajectory $T_i$ executed by $a_i$ at iteration $i$, sample several possible delta actions $\delta a_i^j$, use network to predict resulting trajectory $\hat{T_i^j}$, select the minimum distance $D(\hat{T_i^j}, g)$ between goal $g$ to execute the next iteration action $a_{i+1} = a_i + \delta a_i^{j^*}$
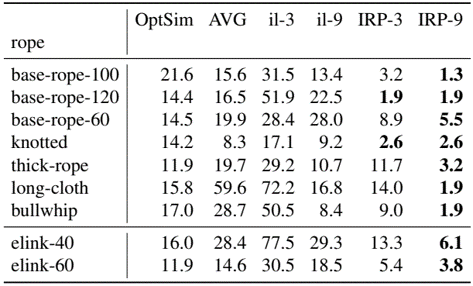
test on 2 tasks: trajectory as observed keypoints’ positions, action as robot’s position and velocity
rope whipping to hit target point
cloth swinging to reach target pose
trajectory is $N_g \times 256 \times 256$ occupancy image with $[0, 1]$ value, action is broadcasted to $N_a \times 256 \times 256$ action image with the same scaled $[0, 1]$ value inside each channel, concatenate them
Delta Dynamics Network uses semantic segmentation model DeepLabV3+
training uses simulation, uniformly sample action and Gaussianly sample delta action and target trajectory can be simulated
initial action as the best average action in training datasets
delta action is sampled from $N(0, (0.5 \times D(T_i, g))^2)$
argue and experimentally validate that residual is better to learn
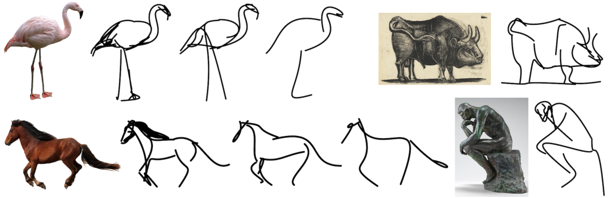
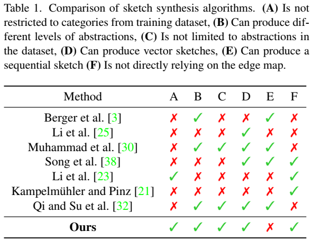
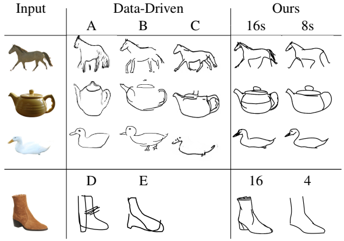
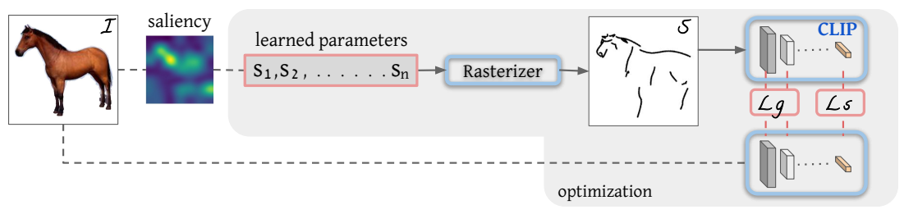
problem and position: converts an image of an object to a sketch, allowing for varying levels of abstraction
method overview: define sketch as Bezier curves and define loss between sketch and image using CLIP to backpropagate to optimize curve parameters
teaser:
results:
method details:
define sketch as a set of $n$ Bezier curves with 4 control points $s_i = {p_i^j}{j=1}^4 = {(x_i, y_i)^j}{j=1}^4$ and use differentiable rasterizer to render
calculate loss between sketch and original image, backpropagate to control points $s_i$
control points are initialized using salient regions, produced by multiplying edge map by XDOG and relevancy map by CLIP
each image to sketch needs an optimization procedure, not a end-to-end model directly outputting sketch
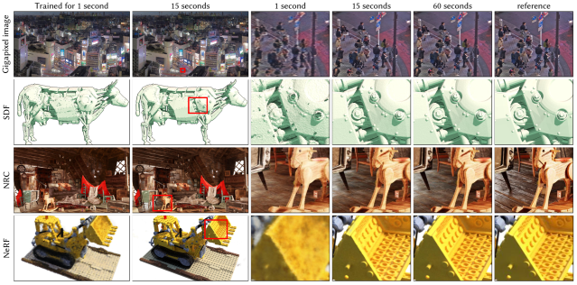
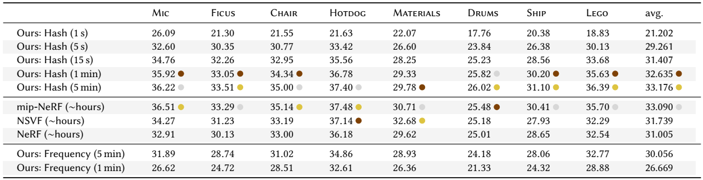
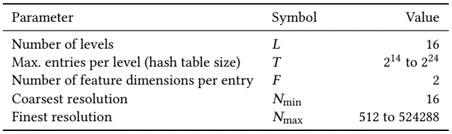
problem and position: deal with encoding MLP coordinate input to improve MLP performance and training speed like in NeRF
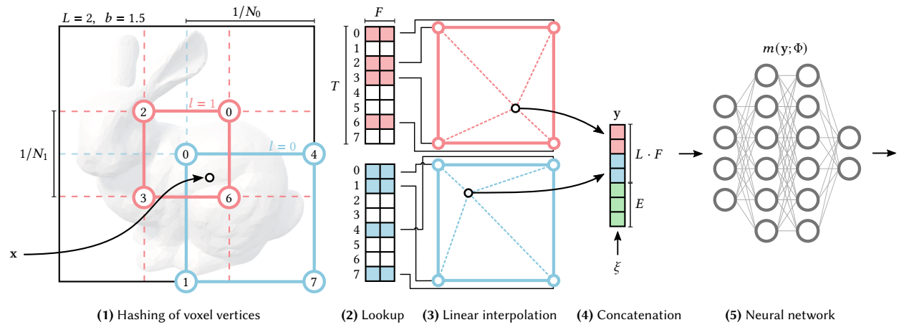
method overview: learnable multiresolution hash table with CUDA implementation
results:
method details:
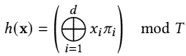
$L$ layers of learnable multiresolution hash table $\theta_l$, each has size $T$, each element has feature dimension $F$
coarser resolution’s mapping from grid corner to table item is 1-1, but finer resolution may exceed $T$ so need hashing, but no explicit collision handling, instead relying on neural network’s magic
implement in CUDA, test across Gigapixel, SDF, NRC and NeRF
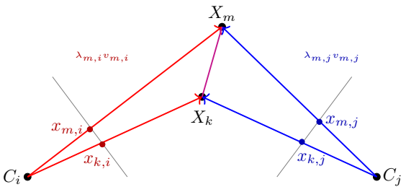
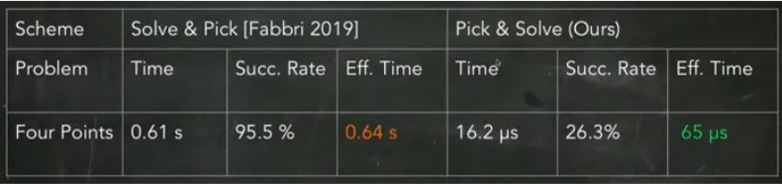
problem and position: learning-based method solving multi-view geometry problem
method overview: MLP predict an initial $(p_0, s_0)$ and then HC, instead of multiple HCs and then select
teaser:
results: accuracy decreases but speed up
method details:
directly solving equations have multiple solutions and many are spurious solutions, we do not want solve them all and then select the right ones, instead we pick an initial anchor and gradually change to the right
problem-solution manifold $M : P \times S$
problem: $p \in R^{20}$: 5 pts in 2 image-views
solution: $s \in R^9$: 10-1=9 unknown point depths
probability density: $\mu$: distribution of real-world $(p, s)$ pairs
projection: $\pi : M \rightarrow P$
offline stage
sample dataset $D$ to represent $M$ and $\mu$
select anchors $A \subseteq D$ so that high fraction of $(p, s)$ from $M_{\mu}$ can be tracked by HC
train MLP selector/classifier $\sigma(p) = a \in A$
online stage
select anchor $a = (p_0, s_0) = \sigma(p)$
Homotopy Continuation from $(p_0, s_0) \rightarrow (p, s)$
actually not restrict to multi-view geometry problem, can be extended to any equations solving problem
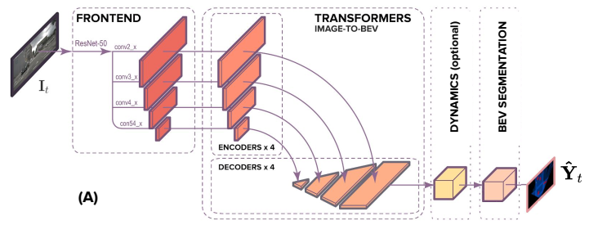
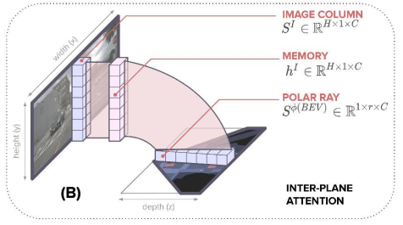
each scale owns individual Transformer encoder, with input sequence as each column in $f_{t, s}^I$, $w_s$ sequences, each sequence has length $h_s$, dimension $C$, produce memory $h_{t, s}^I \in R^{w_s \times h_s \times C}$, only attention among each column
each scale owns individual Transformer decoder, with input sequence as each column in $h_{t, s}^I$, $w_s$ sequences, each sequence has length $h_s$, dimension $C$, produce polar encoding $f_{t, s}^{BEV} \in R^{w_s \times r_s \times C}$, only attention among each column
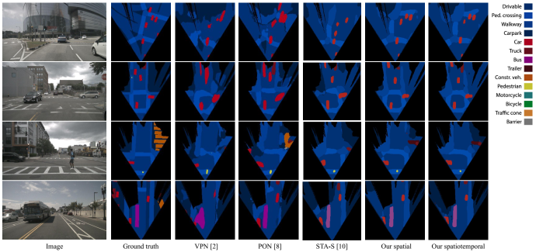
each scale $f_{t, s}^{BEV}$ corresponds to specific radius range, concat to convert into regular grid $f_t^{BEV} \in R^{C \times Z \times X}$
optional dynamics module incorporates temporal information by attention across timesteps
segmentation module inputs $f_t^{BEV} \in R^{C \times Z \times X}$ and outputs segmentation mask $m_t^{BEV} \in R^{Class \times Z \times X}$
information: ICRA 2022 outstanding manipulation paper MIT
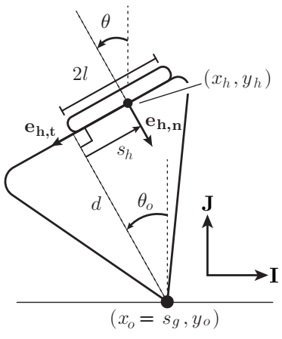
problem and position: manipulate unknown object by regulation of contact configuration
method overview: mathematically model and then estimate unknown values and then use them to control
teaser:
method details:
mathematically model: robot hand $(x_h, y_h, \theta_h) (f_h, \tau_h, \mu_h)$, object $(x_o, y_o, \theta_o)$ and ground
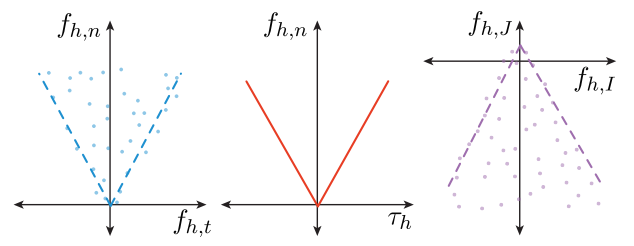
wrench constraint and contact mode/geometry estimator: use ${f_h, \tau_h}_t$ to estimate contact constraint cones and use cones to estimate contact mode
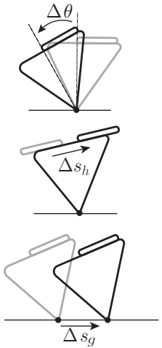
kinematic estimator: use ${f_h, \tau_h, x_h, y_h, \theta_h}_t$ to estimate $d, x_o, y_o, s_h$
low-level impedance control to apply $f_h, \tau_h$
information: ICLR 2022 outstanding paper Tsinghua (Jun Zhu, Bo Zhang)
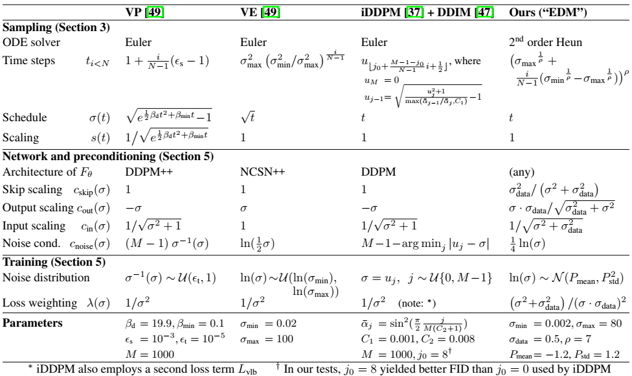
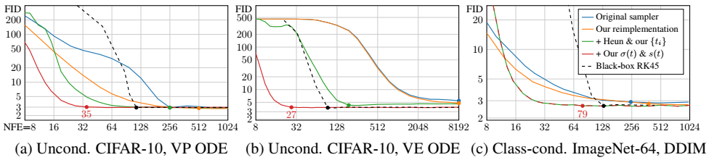
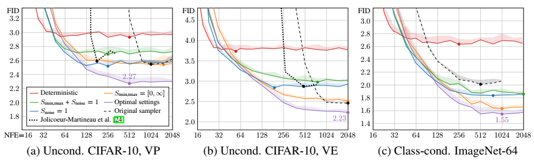
problem and position: derive some theoretic analyses for diffusion model and apply to practice
method overview: derive theoretic optimal value for original hand-craft variance and its theoretic bound to clip estimated value and also theoretic optimal KL divergence for optimal trajectory
results: improve quality and also speed up
method details:
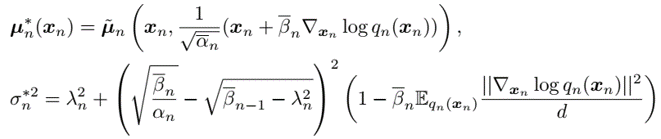
derive theoretic optimal value for original non-reweighted loss
$\mu$ is consistent with original reweighted loss, as score-based model estimating score function $s_n(x_n) = \nabla_{x_n} \log q_n(x_n)$
$\sigma$ can be also estimated by using the score-based model by Monte Carlo sampling $\Gamma_n = \frac{1}{M} \sum_{m=1}^M \frac{|s_n(x_{n, m})|}{d}, x_{n, m} \sim q_n(x_n)$, instead of original hand-craft
also derive theoretic bound for $\sigma$, which can be used to clip the estimated value
least-cost-path problem (solved by denamic programming) formulation for optimal trajectory instead of full $1, \ldots, N$