
👋👋👋 Hi, I’m currently a master’s student from Shanghai Jiao Tong University (SJTU), majoring in Computer Science and Technology (CS), supervised by Prof. Cewu Lu.
Avatars
Prompt: Transfer my uploaded image into a detailed anime aesthetic: expressive eyes, smooth cel-shaded coloring, and clean linework. Emphasize emotion and character presence, with a sense of motion or atmosphere typical of anime scenes, in the style of Studio Ghibli — soft, natural pastel tones, hand-painted textures, lush environmental details, warm and cinematic lighting, and a gentle, nostalgic atmosphere. Square composition, aspect ratio 1:1.
By ASCII generator.
By VGGT.
By Tripo v3.0.
By Grok Imagine.
Prompt: Turn my uploaded image into a detailed anime-aesthetic video, with the boy waving his hand and happily saying, "Hello!". Emphasize emotion and character presence, with a sense of motion or atmosphere typical of anime scenes, in the style of Studio Ghibli — soft, natural pastel tones, hand-painted textures, lush environmental details, warm and cinematic lighting, and a gentle, nostalgic atmosphere.
Education
I enjoy the discovery of science and application of technology, especially in computer science and mathematics.

|
I am currently pursuing a M. Eng. degree in CS from SJTU. During graduate, my average grade point is 3.97/4.0, ranking 1/61. |
|
|
Previously, I obtained my B. Eng. degree in CS from SJTU. During undergraduate, my core average grade point is 92.19/100 (or 4.00/4.3), ranking 8/118. |
Selected Courses
- MA-related
- (MA248) Calculus: 97/100
- (MA270) Linear Algebra: 94/100
- (MA119) Probability and Statistics: 94/100
- (MA238) Discrete Mathematics: 92/100
- (CS445) Combinatorics: 94/100
- CS-related
- (CS7336) Machine Learning: A+
- (CS7353) Deep Learning: A+
- (CS7309) Reinforcement Learning: A+
- (CS7316) Data Mining: A+
- (CS7355) Autonomous Driving: A
- (AU335) Computer Vision: A
- (CS7332) Computer Graphics: A
- (CS467) Computing Theory: 94/100
- (CS308) Compilers: 95/100
- (CS339) Computer Network: 98/100
- (IS307) Cryptology and Information Security: 96/100
- (SE353) Program Analysis and Verification: 99/100
Research
My research focuses on robot learning and robotic manipulation, particularly on developing learning frameworks that enable robots to acquire human-like, physics-aware manipulation skills that adapt to diverse real-world constraints. In the long run, I aim to build generalizable and robust robotic systems that act with both intelligence and stability in everyday environments.
|
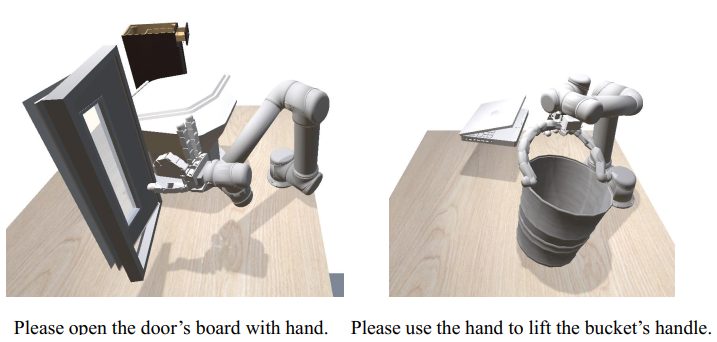
LDexMM: Language-Guided Dexterous Multi-Task Manipulation with Reinforcement Learning
Hengxu Yan, Junbo Wang, Hao-Shu Fang, Qiaojun Yu, Cewu Lu IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 |

|
ForceMimic: Force-Centric Imitation Learning with Force-Motion Capture System for Contact-Rich Manipulation
Wenhai Liu*, Junbo Wang*, Yiming Wang*, Weiming Wang, Cewu Lu IEEE International Conference on Robotics and Automation (ICRA), 2025 |
|
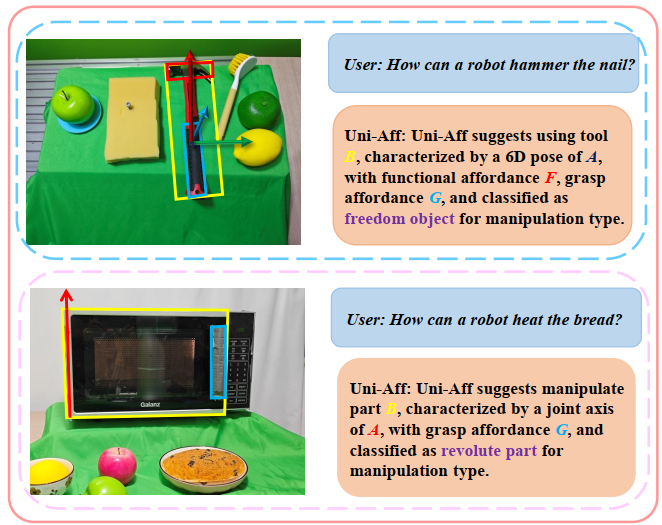
UniAff: A Unified Representation of Affordances for Tool Usage and Articulation with Vision-Language Models
Qiaojun Yu*, Siyuan Huang*, Xibin Yuan, Zhengkai Jiang, Ce Hao, Xin Li, Haonan Chang, Junbo Wang, Liu Liu, Hongsheng Li, Peng Gao, Cewu Lu IEEE International Conference on Robotics and Automation (ICRA), 2025 |
|
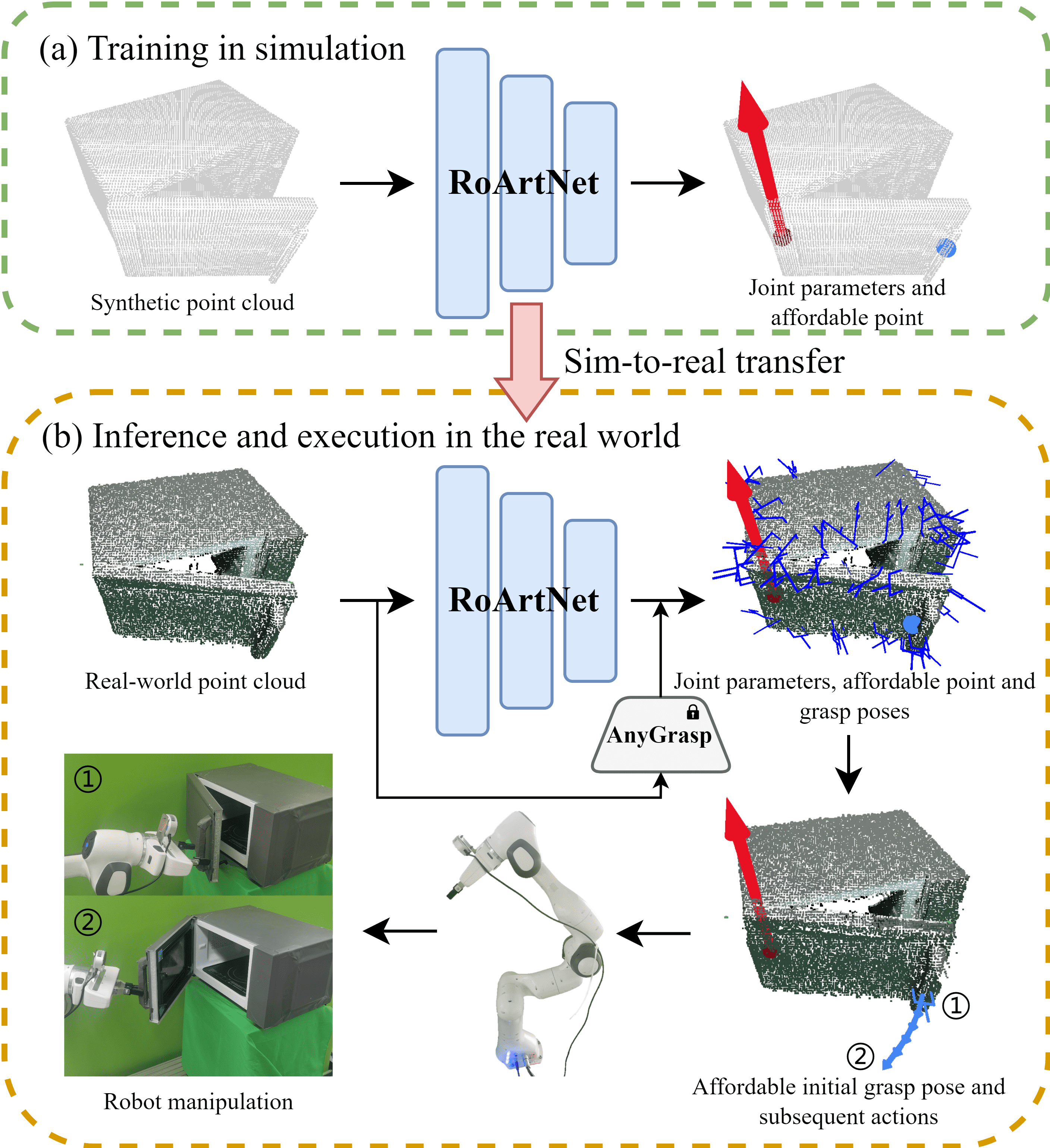
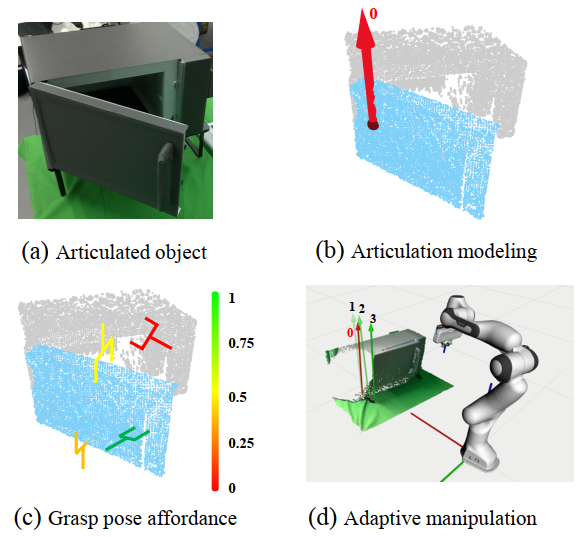
RPMArt: Towards Robust Perception and Manipulation for Articulated Objects
Junbo Wang, Wenhai Liu, Qiaojun Yu, Yang You, Liu Liu, Weiming Wang, Cewu Lu IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 |
|
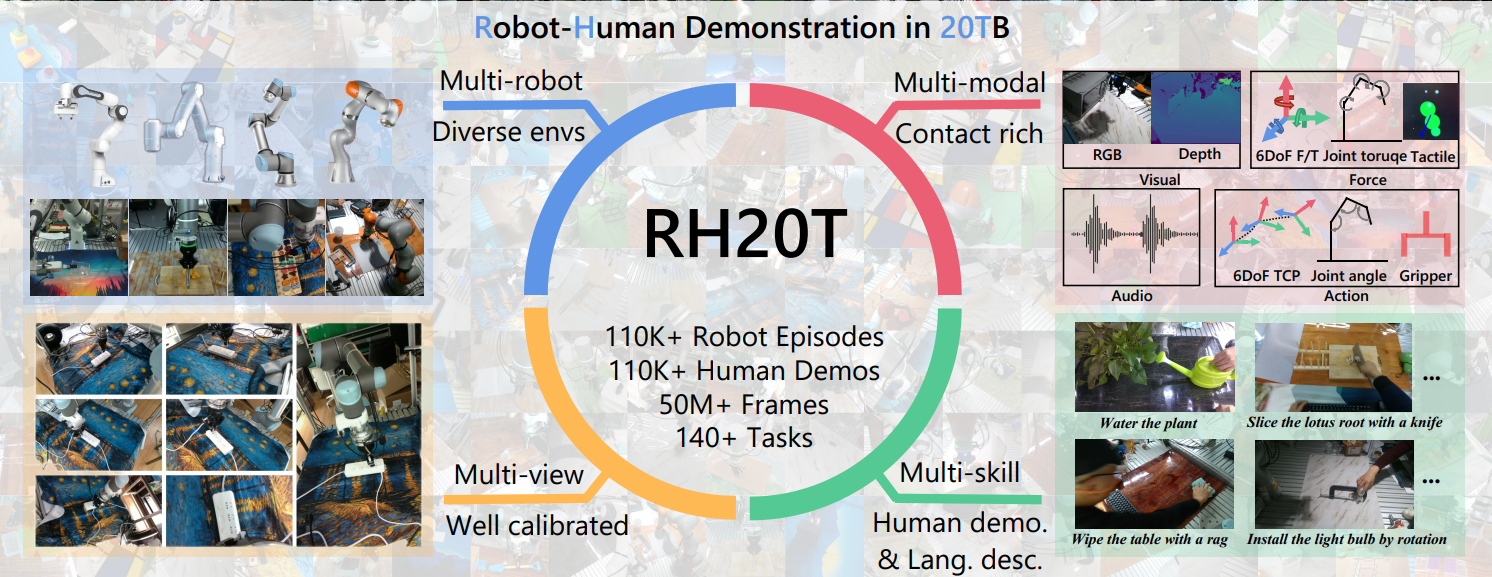
RH20T: A Comprehensive Robotic Dataset for Learning Diverse Skills in One-Shot
Hao-Shu Fang, Hongjie Fang, Zhenyu Tang, Jirong Liu, Chenxi Wang, Junbo Wang, Haoyi Zhu, Cewu Lu IEEE International Conference on Robotics and Automation (ICRA), 2024 |
|
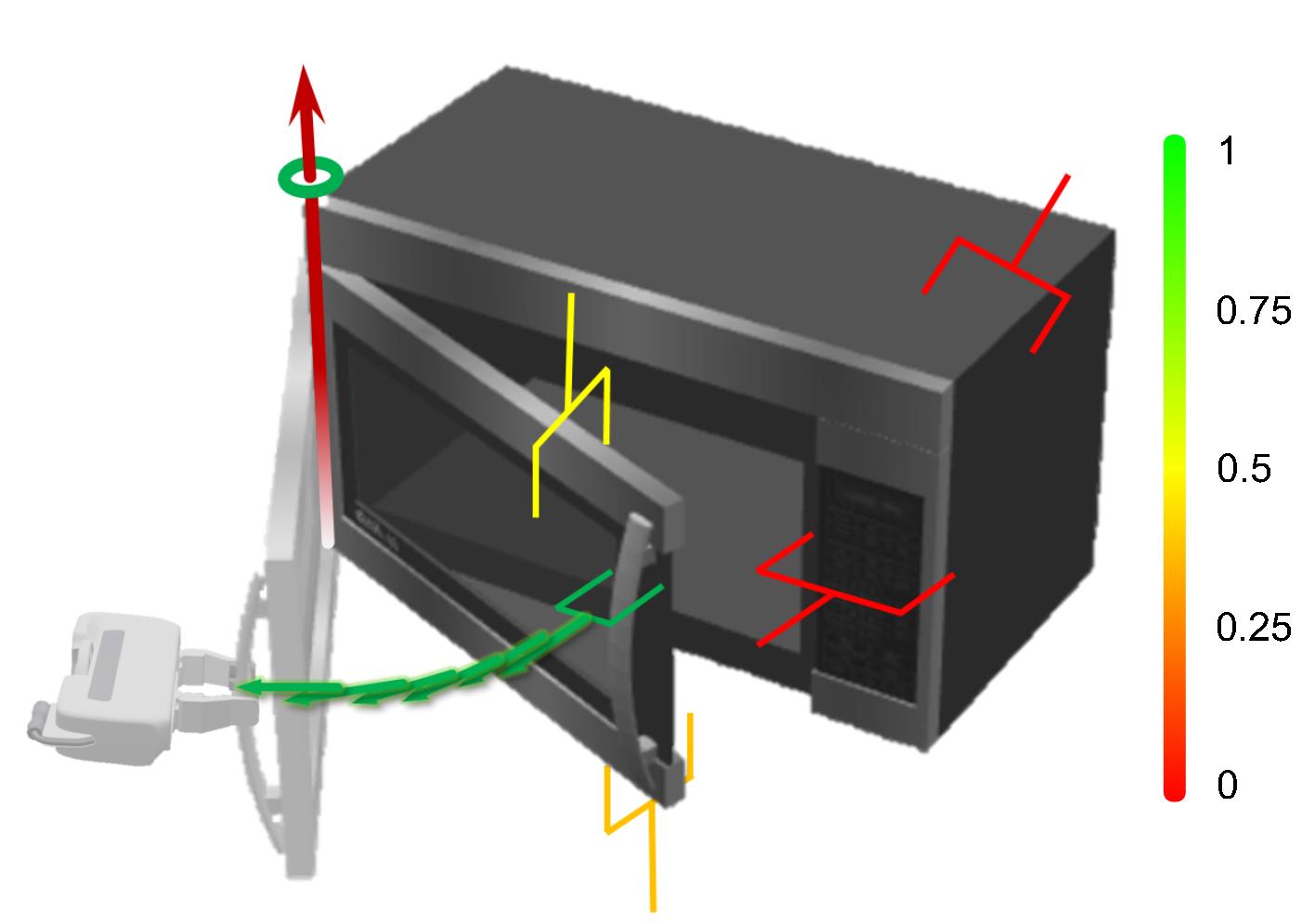
GAMMA: Generalizable Articulation Modeling and Manipulation for Articulated Objects
Qiaojun Yu, Junbo Wang, Wenhai Liu, Ce Hao, Liu Liu, Lin Shao, Weiming Wang, Cewu Lu IEEE International Conference on Robotics and Automation (ICRA), 2024 |
Erdős number: 4
- 4: Junbo Wang
- 3: Cewu Lu
- 2: Leonidas J. Guibas
- 1: János Pach
- 0: Paul Erdős
Experiences
Apart from my study and research, I also did internship and visiting elsewhere to gain new perspectives in different cultures.

|
I visited National University of Singapore LinS Lab about AO-R2S2R: Articulated Object Manipulation within Real-to-Sim-to-Real. |
|
I did research internship in ByteDance AI Lab about SDF2NeRF: Implicit Geometry Prior-Guided Sampling for Indoor Scene Rendering. |
Projects
Alongside my academic work, I also enjoy exploring self-driven projects that allow me to be creative and hands-on.
|
A-PIE: Visual concepts understanding and embodied manipulation for articulated objects (SJTU-CS best undergraduate thesis) |
|
r3kit: Real robot research kit with algos, devices and utils |
|
honors: Curated summaries of AI papers that have received honors on robot learning and computer vision |
|
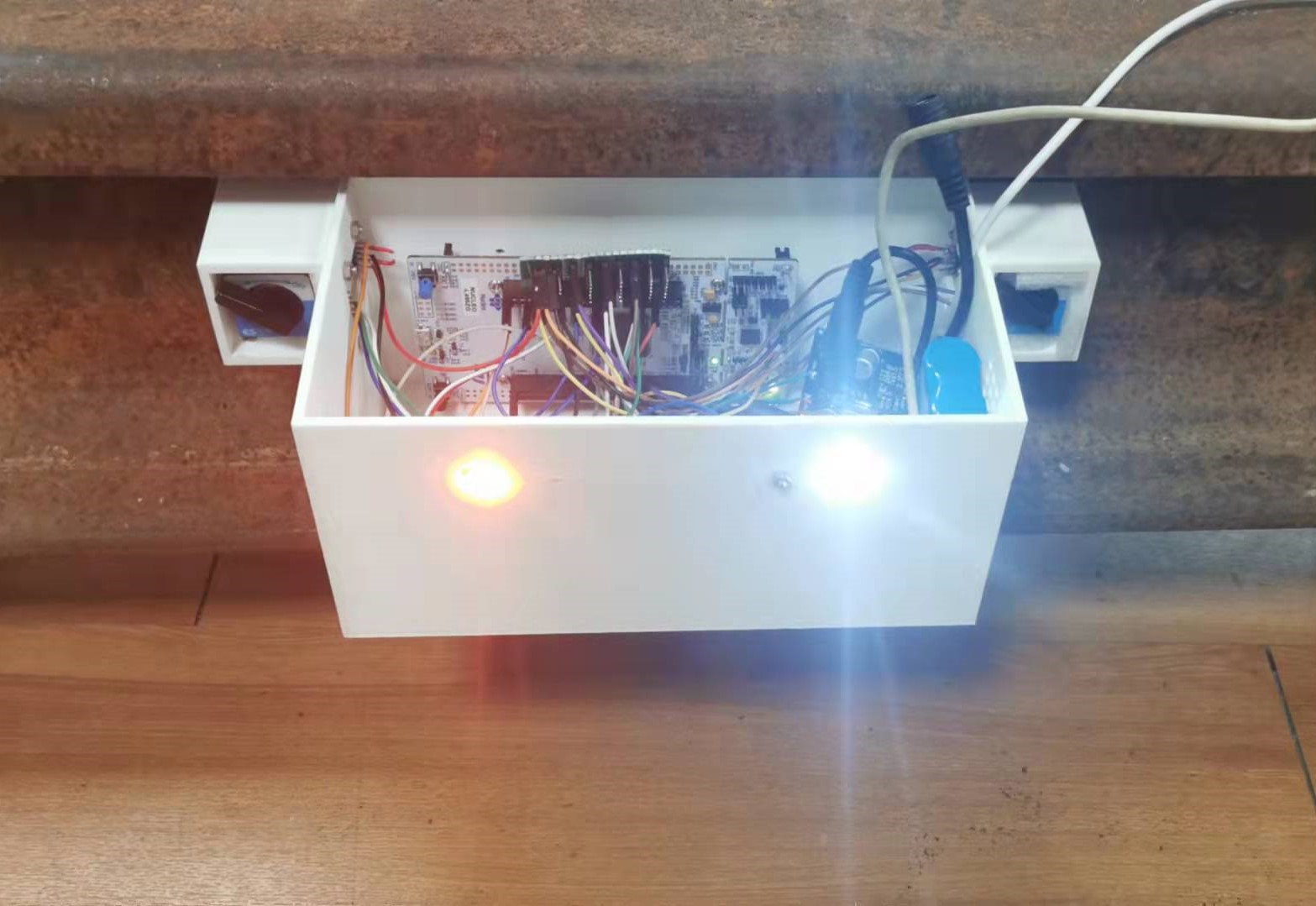
TrainAlarm: Full stack + IoT + MCU application for alerting railway workers (private for patent) |
|
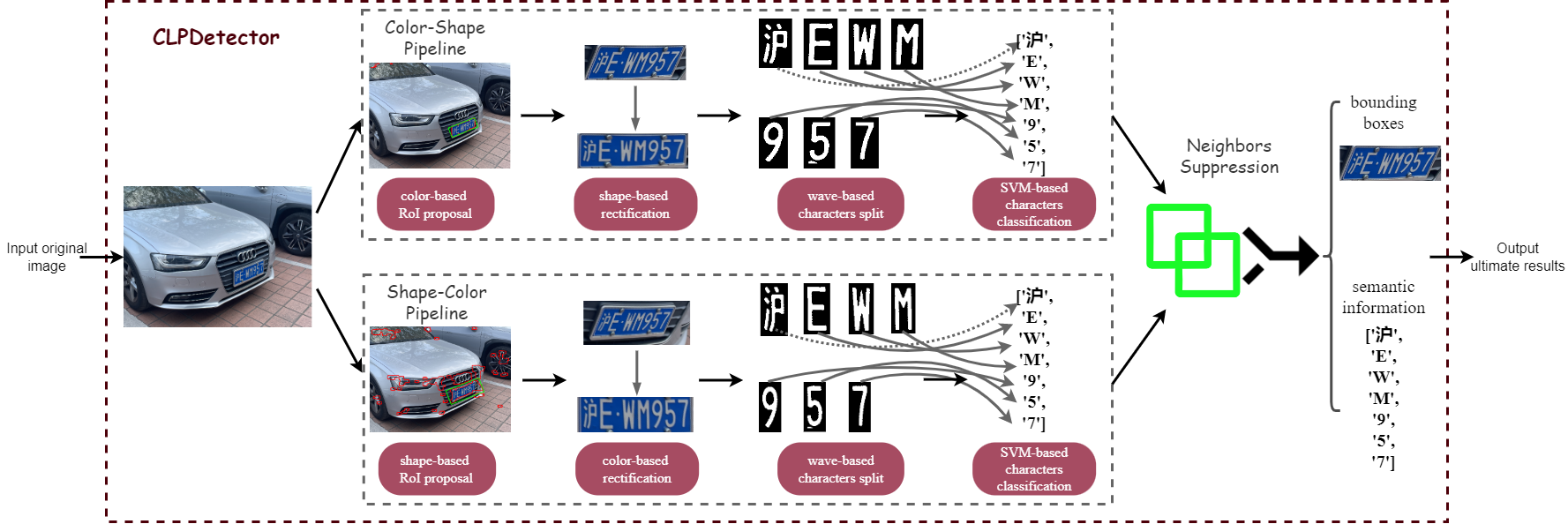
CLPDetector: Color-shape and shape-color two pipelines based Chinese license plates detector |

|
SimPL: Interpreter for a simplified functional and imperative programming language |
|
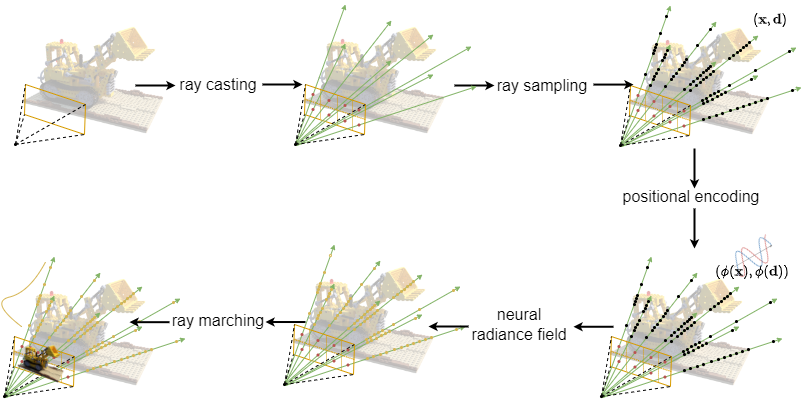
NeRFHowTo: Neural Radiance Fields with clean PyTorch re-implementation |
|
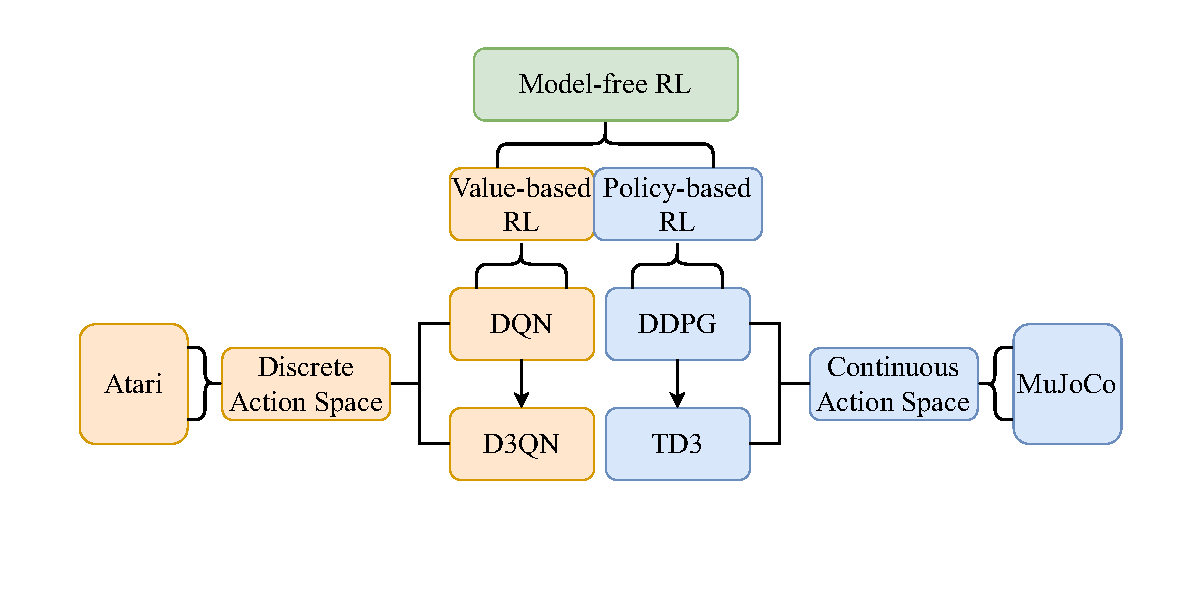
RLDemo: DQN with D3QN and DDPG with TD3 PyTorch re-implementation on Atari and MuJoCo |
|
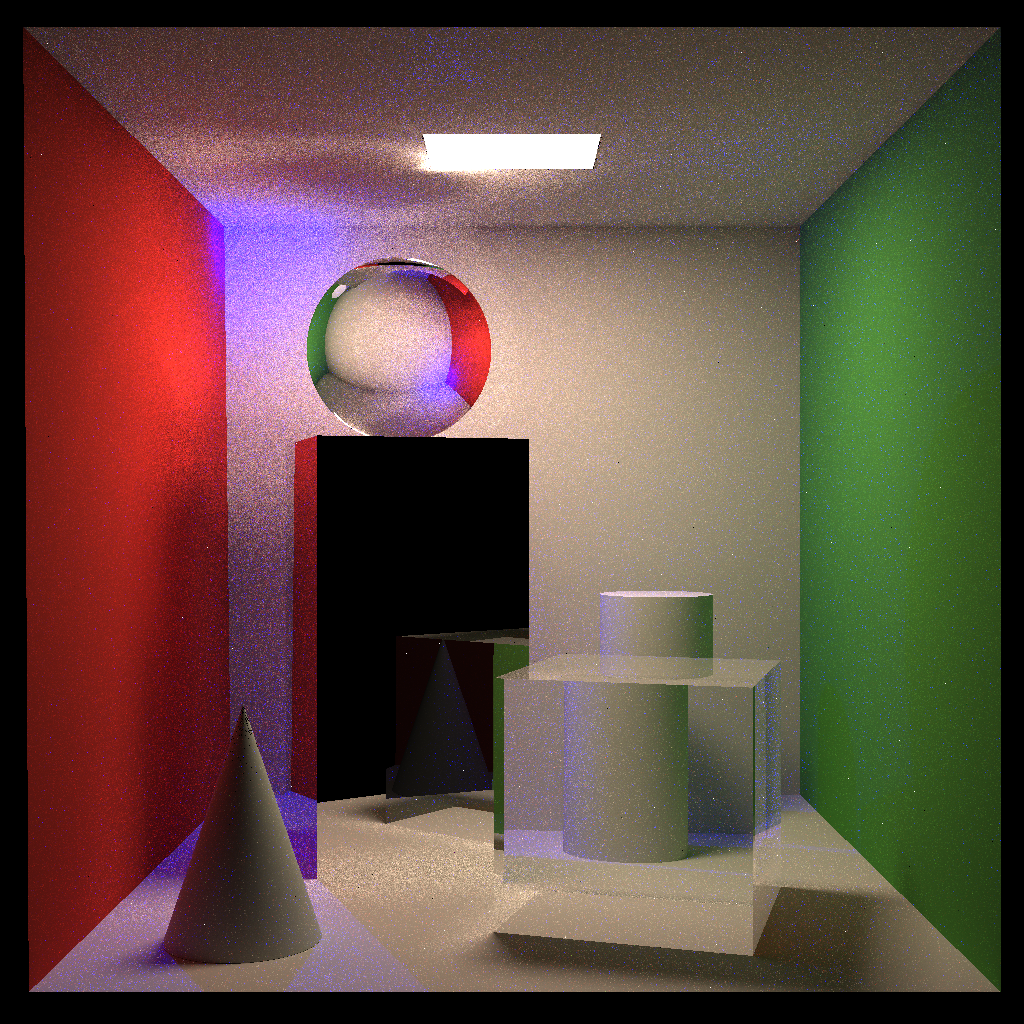
RayTracerHowTo: Handwritten Whitted-style Ray Tracer and Path Tracer with clean C++ implementation |

|
RasterizerHowTo: Handwritten Rasterizer with clean C++ implementation |
Hobbies
In my daily life, I have great passions in staying active and exploring new experiences!
{kind=link}
🏝️
Burj Khalifa
 ,
Gardens by the Bay
,
Gardens by the Bay
 ,
Marina Bay Sands
,
Marina Bay Sands

🕹️
Elden Ring
 ,
Minecraft
,
Minecraft
 ,
Terraria
,
Terraria
 ,
Valheim
,
Valheim
 ,
It Takes Two
,
It Takes Two
 ,
Kingdom Rush
,
Kingdom Rush
 ,
Brotato
,
Brotato
